
BB2A with networking
When networking is enabled, the BB2B roboid can communicate with other roboids or join a site. In this example we use a Unity scene in which the BB2B robot can drive around and show its behaviour.
The Unity Scene
We can include support for Roboid Control as is described in the How-to by importing the Roboid Control for C# library as a subfolder of the Assets folder in Unity.
Next step is to include a Site Server component by creating a new GameObject and attaching the Site Server to that GameObject. We assume that the default port number 7681 can be used, but it that has conflicts with other communication, it can be changed.
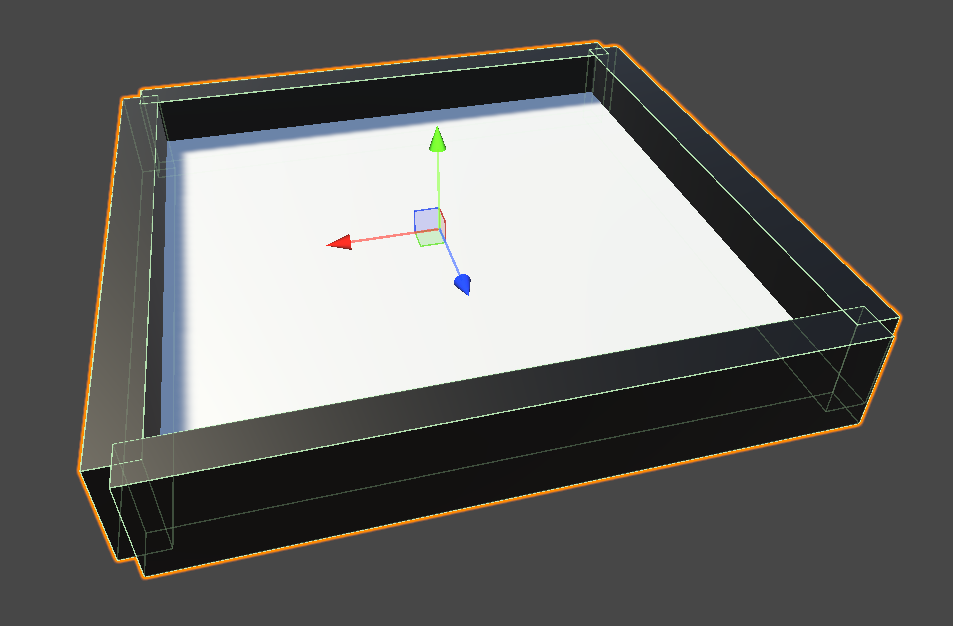
Finally, we have to create an environment in which the BB2B robot can drive around. We do this by creating a 3mx3m plane with Cube around it for walls:
Now we have to make an updated BB2B which can connect to this environment and drive around. We provide 2 options:
Arduino | |
| With an Arduino controlled robot | With a locally running script |